

Multifunctional Product
1.Function Introduction
Integrating multi-mode fusion of satellite, laser, vision, encoder and other positioning and perception technologies to achieve automatic driving of tire crane vehicles, including automatic correction (vision+satellite), intelligent collision avoidance (vision+laser), and precise parking (satellite+encoder) functions. Efficient operations are carried out at docks where people and vehicles are mixed, and where there are people and unmanned trucks. Receive TOS instructions, automatically drive the yard crane to the designated container area and accurately stop at the target position. Driving efficiency is slightly higher than experienced drivers.
2.Technical indicators
Positioning accuracy:<15mm, positioning reliability>99.99%, position refresh rate: 1-20Hz
Driving deviation: Normal driving<± 30mm, start stop<± 50mm, directional deviation<0.1 °, up to 95% full speed;
Target detection size: It can detect obstacles of 30cm x 30cm x 30cm size within a range of 6 meters, and obstacles of 50cm x 50cm x 50cm size within a range of 15 meters.
Obstacle recognition and detection range: 0~30m; The obstacle recognition refresh rate is 10Hz, and the collision response time is less than 500ms;
Parking accuracy: The deviation from the center of the parking position is less than 2 centimeters, and the deviation from the angle of the left and right wheels is 1 centimeter. The parking curve is better than manual operation, and it can be stopped accurately in one step.
3.System function
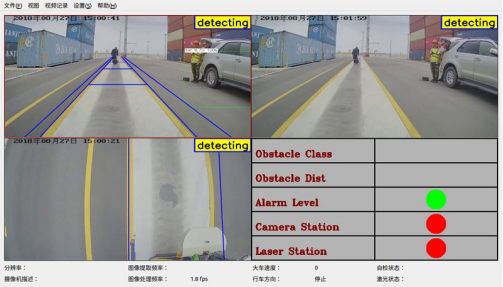
Vehicle collision avoidance: obstacle recognition (laser scanning), intelligent collision avoidance module (RTG equipment control system), real-time data feedback (video of the vehicle's driving perspective, obstacle data, and overlaid video)
Automatic correction: large vehicle correction (GNSS positioning, map, visual recognition), collision protection (minimum and maximum distance parking protection function), yard area judgment (automatic recognition of yard position), automatic crossing (adjacent yard transition area correction function), large vehicle transition support (automatic correction of tires at 90 degrees in the tire crane large vehicle transition area), fault judgment warning (in case of system power failure or fatal fault)
Vehicle positioning: Obtain real-time GNSS position, and when it briefly fails, the encoder deduction will continue to ensure continuous output of positioning data, and control the vehicle to accurately stop at the target position through its own motion control algorithm.

4.System advantages
The progressiveness of the system includes: all-weather adaptation, automatic walking, automatic deviation correction, automatic parking (optional), intelligent anti-collision, multi technology redundancy, advanced algorithms, unique control strategies, standard interface protocols, unified entrance of multiple systems, etc., as well as real-time data collection and analysis process, full protection, standard interface, scalability and easy maintenance.
Adopting the fusion technology of "laser+vision+RTK+encoder" recommended by Tang En, based on the precise Beidou RTK over a wide range, the fusion of laser scanning and visual recognition technology is used to achieve precise positioning and recognition algorithm core. Data such as encoders and numbering icons of port machinery and yards are collected, and the core positioning algorithm is optimized to assist in achieving centimeter level precise positioning and control of automated yard cranes in all weather, all area, and all time conditions.
